Smart nesting box
Smart nesting box is small wooden box for nesting birds. It is equipped with the live camera feed and some sensors. Four smart nesting boxes were made and three of them were placed in the wild. One was inhabited with the great tit in te early march 2017. After that, the bird laid 11 eggs. The bird then incubated eggs for 12 days. On the Easter Monday, the first shells cracked and newborns started poping out of the eggs.
I prepared the whole project for local school. The nesting boxes were made by 8 children aged from 11 to 14 during afternoon classes. It was great fun and the young scientists learned many new skills from electronics, materials, hand tools, crafting, programming, components, circuit design, biology, photography, physics, etc… The nesting box is described in detail here with all necessary production steps. Contact for further info is m@v4.si. The three nesting boxes placed in the wild have…
The concept
The base for construction was this drwaing which I found at the local ornithology site:

The internal size and entrance dimensions are crucial. Other measurements can vary. I decided to keep the frontal wall same as with the original plans and extend the depth of the nesting box.
The nesting box without electronics will look like this:

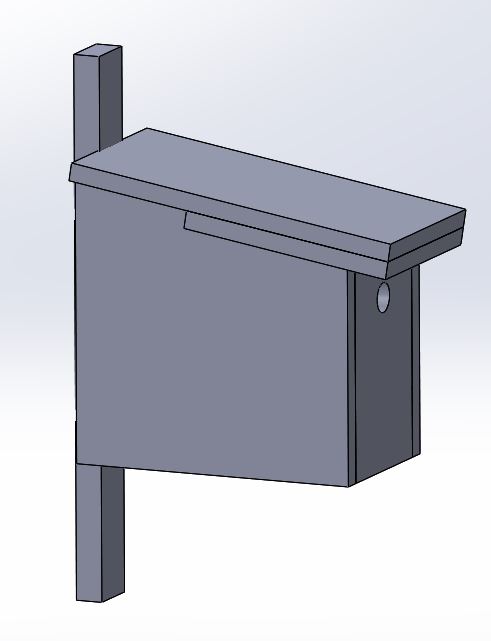
When “normal” roof is removed, it can be replaced with smart roof:

and the electronics is attached to this smart roof:

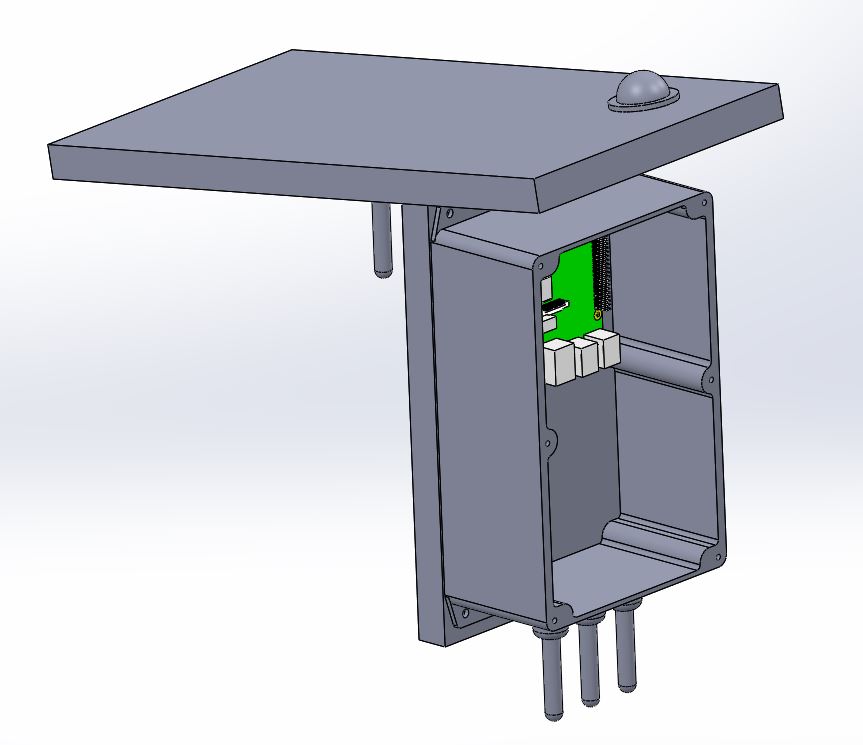
New smart roof has semnsors, camera and the central unit for processing images and sending sensor readouts.



Mechanical construction
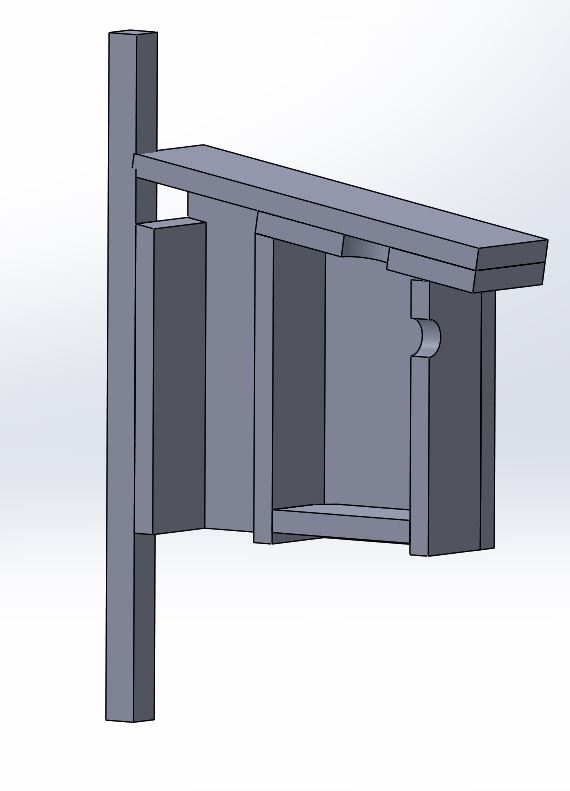
The mechanical construction consists of two main parts: the nesting box and smart roof with electronics:
Here is “Size A”, which is suitable for smaller birds. There are two roof options: 1. classic, which is used to cover the hole in the internal ceiling (where the camera and sensors fits in the interior) and 2. “smart” roof with sensors and camera with electronics. The interactive 3D model is hosted on 3DcontentCentral:
Download complete  model…
model…
Here is Construction animation:
::: Assembly instructions (PDF) :::


Front plates are made from sheet metal. I ordered laser cutting from local metal shop. They made it for free, because the project was not commercial.
Company Povše metal from local Šentrupert use high tech CNC laser cutters.
They even produced two of each front plates for all nesting box sizes.

After assembly, use weather proof paint and protect the wood from the elements. Keep in mind the darker paint will get hot if the nesting box is placed on the open. It is now time to find the quiet place for the nesting box in the shadow: northern part of the house, remote tree with thick shadow, etc…
Make nesting box “smart”
Base for nesting box was Raspberry Pi. It is a well known “tiny and affordable computer that you can use to learn programming through fun, practical projects. Join the global Raspberry Pi …”
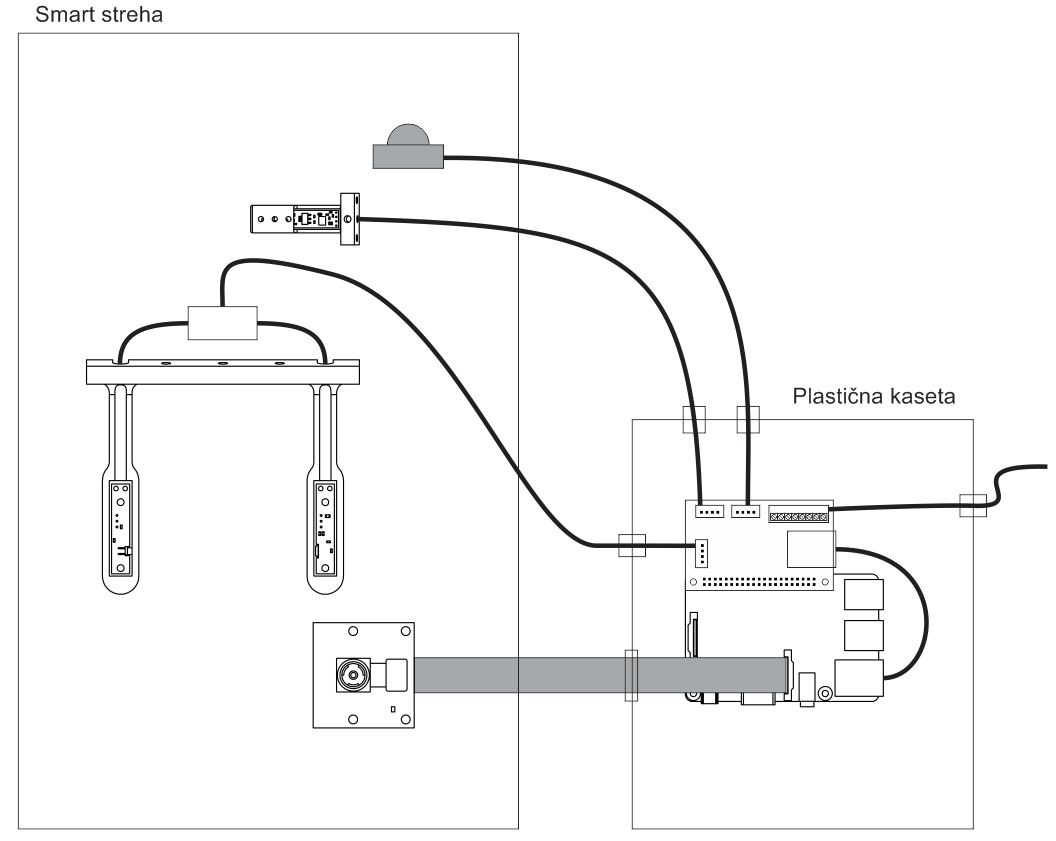
The block diagram:

Smart nesting box block diagram
Not all components from the diagram were assembled due to lack of time. Remember, the whole development and construction process was run by 8 young students from elementary school and the have to learn everything from scratch. Left side are sensors: illumination, RH/T/p, optical entrance barrier and camera (from top to bottom in the above drawing).
Illumination
The illumination sensor was not completed and was left for next generation nesting boxes.
Climatic sensor
Climatic sensor measuring humidity, temperature and air pressure was one of the earlier designs here with small modification. The RS485 was replaced with 3,3V serial interface on both sides (R.pi and sensor) due to short distance.
Optical barrier
The Optical barrier sensor was made with IR LED and PIN photodiode. The sensor performed excellent.

Photo interrupter schematic diagram
Photo interrupter prototype
Altium files can be requested via email.
Camera
Camera for this project was Raspberry Pi NoIR camera. It is same as usual camera used for R.Pi with small exception. There is no IR filter on the top of the image sensor, which usually prevents IR light reaching the sensor. When dark scene is illuminated with IR light it can be observed in the darkness. It is also the only way to observe the interior of the nesting box without interfering with the birds daily routine. Birds are known to orientate their lives with the daylight.
Camera illumination was done with 9 IR LEDs:
There are two version of the housing with the IR LEDs, both available here. The final version of the ledp PCB is here.
Raspberry Pi breakout board
Finally, the raspberry pi needs breakout board with PoE for connection of all sensors and powering it up.
Software
Here is step-by-step for R.Pi configuration
Install R.pi + Raspbian Jessie Lite from https://www.raspberrypi.org/downloads/raspbian/
Use Win32DiskImager
R.Pi has no ssh enabled, so connect to hdmi/tv, log in and…
sudo raspi-config |
expand file system
advanced, enable SSH
generate new ssh keys
sudo /bin/rm -v /etc/ssh/ssh_host_* sudo ssh-keygen -t dsa -N "" -f /etc/ssh/ssh_host_dsa_key sudo ssh-keygen -t rsa -N "" -f /etc/ssh/ssh_host_rsa_key sudo ssh-keygen -t ecdsa -N "" -f /etc/ssh/ssh_host_ecdsa_key sudo ssh-keygen -t ed25519 -N "" -f /etc/ssh/ssh_host_ed25519_key sudo systemctl restart sshd.service sudo reboot sudo apt-get update sudo apt-get dist-upgrade |
Y(es)
q(uit)
………. this may taaaaaakeeeee loooooonnggg
…. continue with ffmpeg installation
mkdir ffmpeg cd ffmpeg wget https://github.com/ccrisan/motioneye/wiki/precompiled/ffmpeg_3.1.1-1_armhf.deb sudo dpkg -i ffmpeg_3.1.1-1_armhf.deb sudo apt-get install python-pip python-dev curl libssl-dev libcurl4-openssl-dev libjpeg-dev libx264-142 libavcodec56 libavformat56 libmysqlclient18 libswscale3 libpq5 |
Y(es)
sudo nano /etc/rc.local |
Sorry, this is for local ARNES academic and research network. Google around how to use youtube live event or youstream…
———8<——–/etc/rc.local———8<——–
raspivid -o - -t 0 -a 12 -a "Civ 1 %T %d.%m.%Y" --mode 4 -fps 25 -f | ffmpeg -re -i - -codec copy -f flv rtmp://ARNESUSER:ARNESPASS@prenosi.arnes.si/PRENOSVŽIVOIDENT/arnes & ---------8<--------/etc/rc.local---------8<-------- sudo usermod -a -G dialout pi sudo raspi-config |
… IO…. disable console on uart
sudo nano /boot/config.txt |
check to have …….. enable_uart = 1
wget pavlin.si/krozek/sw/civ sudo mv civ /bin sudo chmod +x /bin/civ sudo apt-get install bc wget pavlin.si/krozek/sw/report.sh /~ wget pavlin.si/krozek/sw/vhod.sh /~ chmod +x report.sh chmod +x vhod.sh crontab -e |
confirm “nano”
add (every 2 minutes weather report, 10 minutes after 1AM a “preventive reboot”)……………
*/2 * * * * /home/pi/report.sh 10 1 * * * sudo /sbin/shutdown -r +5 |
Install screen (GPIO for the entrance optical sensor operates from script running in screen shell):
sudo apt-get install screen |
install gpio application
sudo apt-get install git-core git clone git://git.drogon.net/wiringPi cd ~/wiringPi git pull origin ./build |
……….check….>>>
gpio -v sudo apt-get install gpio |
add in /etc/rc.local
———8<——–/etc/rc.local———8<——–
…
…
…
#start entrance detector script in detached screen session named 'vhod' su - pi -c "screen -dm -S vhod /home/pi/vhod.sh" |
…
———8<——–/etc/rc.local———8<——–
that’s about all. The application for reading the RH/T/p sensor is written in C using NetBeans. The instructions how to install netbeans remote debugging for R.Pi are here.
The complete source code for “civ” is at very early phase.
Placing the nesting box in the wild
The nesting box “Civ 2” was placed in the walnut tree, away from the houses at the edge of the vineyard.

And the final result…
Video moments from first month.

First visit (both male and female tit)

Mating ceremony

Start building the nest

Nest almost finished

First seven eggs

Final laying: 11 eggs

Hatching, male brings the food

First cracks, female eats the shells

First birds saw the light

Hungry youngsters
Video of both parents breeding
Some interesting findings (entrance crossing rate):

Crossing the nest entrance. The daylight saving was changed and can be seen on 26.3.
Please send email for complete data records.
This is awesome. Love the data too.
Today they left the nest:
https://youtu.be/kLL5xzCuMYM